Survey
Xtrack provides a survey method associated to the line that can be used to
compute the position and orientation of the local reference frame in a global
coordinate system. The returned table contains, among other quantities, the
global coordinates X, Y and Z and the orientation angles theta,
phi and psi at each element.
For a complete description of the available options, please refer to the Survey API reference.
Basic usage
The following example builds a small line, computes its survey, inspects a few
columns from the resulting table, and makes a floor plot using
survey.plot.
import numpy as np
import xtrack as xt
# Build a simple line with four bending magnets and three quadrupoles.
env = xt.Environment(particle_ref=xt.Particles(p0c=1e9))
line = env.new_line(length=12, components=[
env.new('b1', xt.Bend, length=0.5, angle=np.deg2rad(22.5),
k0_from_h=False, at=1.5),
env.new('qf1', xt.Quadrupole, length=0.3, k1=0.4, at=2.8),
env.new('b2', xt.Bend, length=0.5, angle=-np.deg2rad(22.5),
k0_from_h=False, at=4.0),
env.new('qd1', xt.Quadrupole, length=0.3, k1=-0.4, at=5.5),
env.new('b3', xt.Bend, length=0.5, angle=-np.deg2rad(22.5),
k0_from_h=False, at=8.0),
env.new('qf2', xt.Quadrupole, length=0.3, k1=0.4, at=9.2),
env.new('b4', xt.Bend, length=0.5, angle=np.deg2rad(22.5),
k0_from_h=False, at=10.5),
])
# Compute the survey.
survey = line.survey()
# Inspect selected columns of the survey table.
survey.cols['name s X Y Z theta phi psi']
# Make a floor plot of the reference trajectory in the Z-X plane.
import matplotlib.pyplot as plt
plt.close('all')
survey.plot(
projection='ZX',
labels=['b1', 'b2', 'b3', 'b4'],
element_width=0.12,
figsize=(6.4, 4.8),
)
fig1 = plt.gcf()
plt.title('Survey floor plot')
fig1.subplots_adjust(left=.13, right=.95, bottom=.13, top=.90)
plt.show()
# Complete source: xtrack/examples/survey/000_survey.py
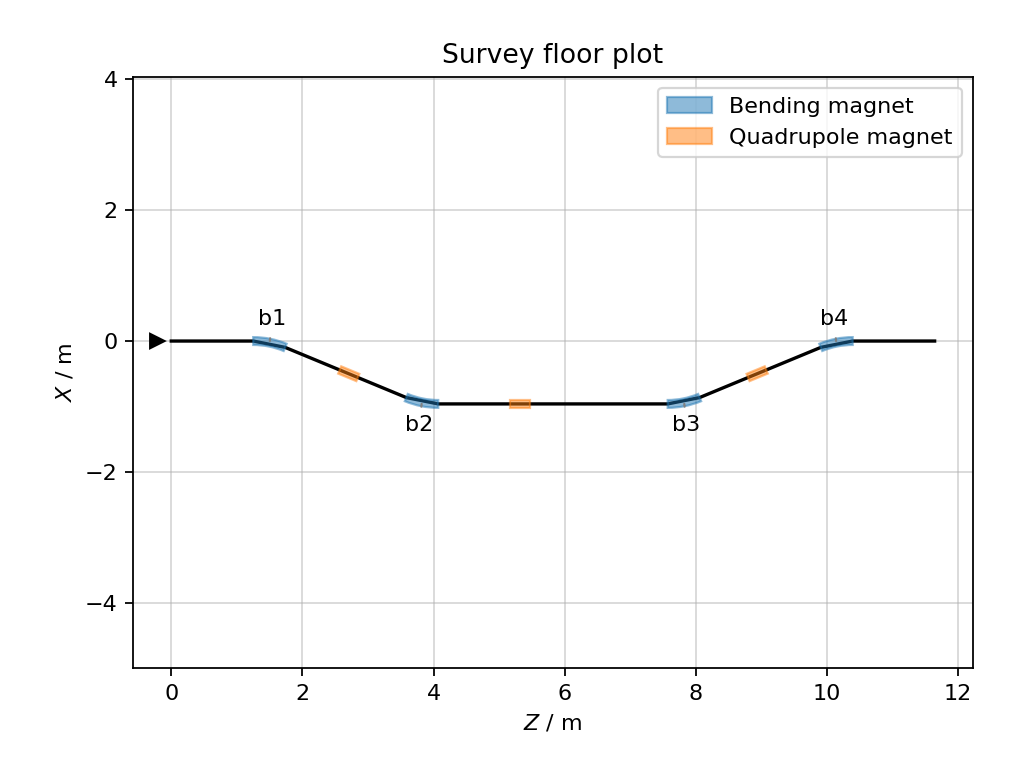
Floor plot of the reference trajectory as obtained from Xtrack survey.
Starting from a selected element
By default, line.survey() starts from the beginning of the line with the
global frame aligned to the local reference frame. A different origin and
orientation can be selected with element0 and the initial coordinates
X0, Y0, Z0, theta0, phi0 and psi0.